
Kilka tygodni temu przedstawiłem Wam na blogu nowy zestaw robotów od iRobot, które przejęły znaczną część moich obowiązków związanych ze sprzątaniem. Roomba i7+ ze stacją Clean Base oraz Braava jet m6 odkurzają i mopują podłogi w Moim Smart Domu. To kolejne smart urządzenia dołączające do platformy, którą buduję w mieszkaniu już od kilkunastu miesięcy. Zwykle każdy nowy moduł tego wyposażenia przedstawiam w oddzielnym artykule, ale w przypadku tegoż kompletu powstaje seria. Nie pomieściłbym wszystkiego w jednym materiale, a zależało mi na dokładnym przyjrzeniu się poszczególnym funkcjom robotów.

W poprzednim odcinku przedstawiłem (link po lewej stronie) główne możliwości Roomby i Braavy, a konkretnie:
- stację Clean Base dla Roomby i7
- instalację i konfigurację robotów sprzątających iRobot
- technologie vSLAM, Imprint Smart Mapping i iAdapt 3.0
- zapowiedź współpracy robotów przez Imprint Link
- współpracę z asystentem głosowym
- efektywność sprzątania Roomba i Braava
W tym wpisie znajdziecie kolejne akapity moich doświadczeń, ale tym razem nieco głębszych. Roboty sprzątają już u mnie wystarczająco długo, by zacząć dzielić się konkretnymi wrażeniami. Spróbuję ocenić integrację Roomby i Braavy z moim smart home, działanie stref no-go oraz blockera Dual Mode Virtual Wall, pokażę dokładniej tryby mycia mopem, aplikację iRobot Home, a także najnowszy system współpracy Imprint Link, który komunikuje oba roboty i pozwala urządzeniom współpracować.
Braava i Roomba i7+ w Moim Smart Domu
Muszę tu na początek przypomnieć, czym jest Mój Smart Dom. Stworzyłem na blogu oddzielną serię poświęconą wszystkim urządzeniom i rozwiązaniom, które faktycznie biorą udział w tworzeniu mojej osobistej smart sieci. O inteligentnym wyposażeniu piszę bardzo dużo, ale tylko jego części udaje się trafić do mojego wnętrza na stałe. Za podłogi odpowiedzialne są teraz roboty iRobot. Zależało mi, by roboty nie tylko dbały o porządek, ale też współpracowały z resztą moich modułów lub chociaż były gotowe na połączenie w scenariusze pracy z przyszłymi gadżetami. Roomba i Braava dają tu kilka opcji.
W poprzednim wpisie zaznaczyłem, że Roomba i7+ oraz Braava jet m6 zostały przygotowane do współpracy z asystentami głosowymi (Alexą i Asystentem Google), a więc możemy im wydawać polecenia. Temat ten jeszcze kiedyś rozwinę, bo w Polsce wciąż czekamy na aktywację języka polskiego w smart głośnikach. To od oficjalnego wsparcia platformy zależy komfort użytkowania w połączeniu z komendami, więc na pełnię tych funkcji trzeba u na jeszcze trochę poczekać. Do dyspozycji jest jednak kanał w serwisie IFTTT, który został dodany przez iRobot już w 2017 roku. Czym jest If This Then That? To mega fajna platforma z możliwością łączenia wielu urządzeń do działania we wspólnych akacjach.

IFTTT to rodzaj programowania w Internecie Rzeczy, którego częścią są też roboty sprzątające iRobot. Kanał umożliwia tworzenie własnych apletów lub korzystanie z już gotowych (przygotowanych przez innych użytkowników serwisu). Roboty staną się wtedy częścią tzw. connected home. Pozwoli im to automatyzować procesy lub uruchamiać działania w zależności od konkretnych warunków. Producent do samego sprzątania nie potrzebuje dodatkowych rozwiązań, bo posiada m.in. harmonogramowanie, ale dzięki IFTTT otwiera swoje możliwości szerzej. W jaki sposób? Oto kilka przykładów, które wybrałem specjalnie do pokazania potencjału drzemiącego w tego typu akcjach.
Pracę Roomby i Braavy możemy automatycznie przerwać, gdy niespodziewanie dotrzemy do domu, a roboty miały już zaplanowane działania. Tzw. geofencing rozpozna nasz przyjazd i nakaże powrót robotom do swoich baz. Wszystko po to, by sprzęt nie plątał nam się pod nogami. Oczywiście praca się wznowi, gdy wyjdziemy z mieszkania. Jeśli powiązaliśmy IFTTT z naszym smartfonem to zyskamy możliwość wstrzymania pracy robotów na czas połączenia telefonicznego. Serwis wyczuje nadchodzące połączenie i wyciszy urządzenia.
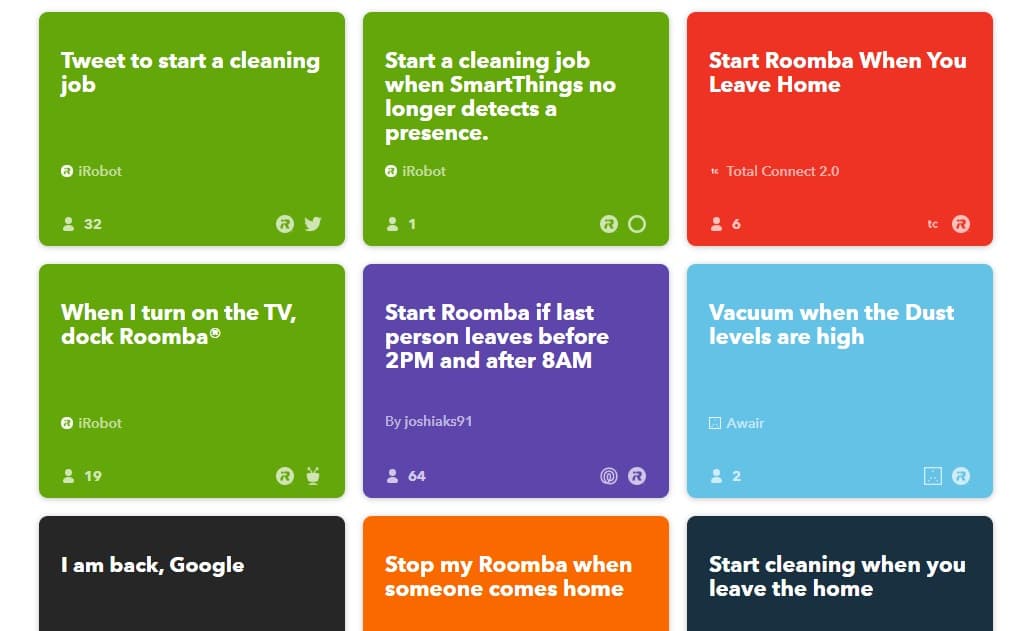
Ilość akcji zależy głównie od posiadanego w domu smart wyposażenia. Roboty mogą reagować na dźwięk smart dzwonka do drzwi (tu też można zaprogramować ich wstrzymywanie) lub błyskać smart oświetleniem (np. Philips Hue) po skończonym odkurzaniu. Część takich działań jest praktycznych, część tylko bajerem, ale fajnie, że to my możemy decydować o ich stosowaniu. Posiadacze smart przycisków mogą je programować do konkretnych działań (np. sprzątania konkretnego pomieszczenia). Podoba mi się np. współpraca iRobot z czujnikami Wyze (tych do wykrywania włamywaczy). Ich powiązanie odcina detekcję ruch podczas przejazdów Braavy lub Roomby, by nie aktywowała alarmu lub powiadomień. Jeśli budujemy smart dom to warto zerkać, czy producenci posiadają swoje kanały na platformie IFTTT. Wspólnie z Google można nawet stworzyć akcję „I am back, Google”, co zadziała jak wspomniany na początku geofencing. Możliwości są prawie nieograniczone i będą rosły. Trzeba tylko wiedzieć, co można w smart domu osiągnąć.
Strefy no-go i Dual Mode Virtual Wall
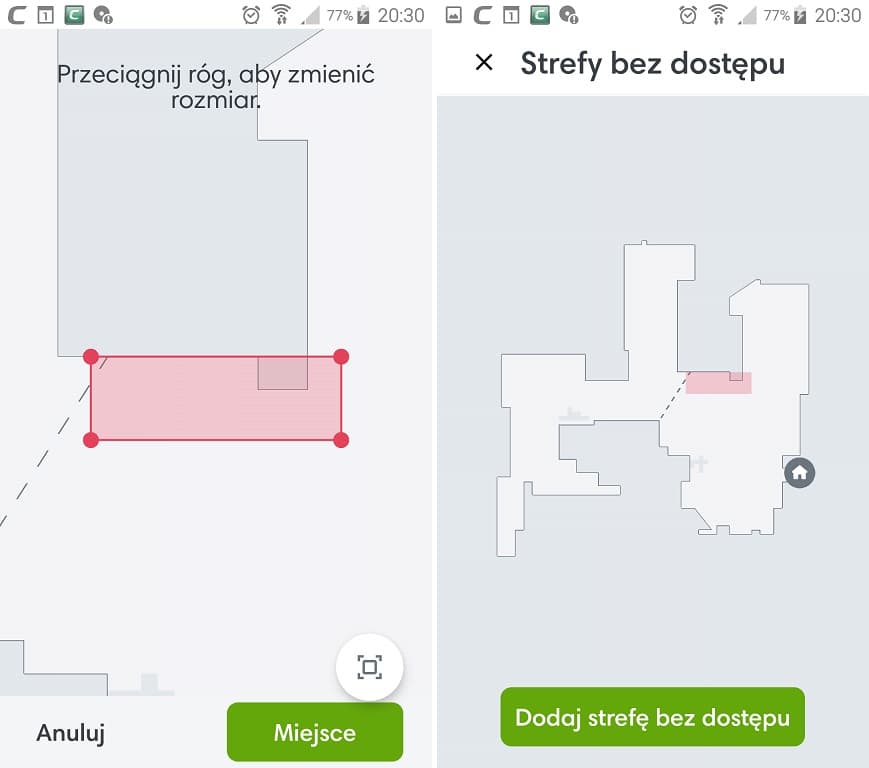
W pierwszym artykule pokazywałem, jak dokładnie mapują mieszkanie roboty od iRobot. Roboty sprzątające dysponują kilkoma technologiami do oceny wnętrza, ale czasem wolimy, by w pewne rejony Roomba lub Braava raczej nie wkraczały. iRobot stworzył do tego celu dwa rozwiązania. Możemy zastosować moduł wirtualne ściany Dual Mode Virtual Wall lub oznaczyć na wirtualnej mapie naszego mieszkania tzw. strefy „no go”. Drugie z tych dwóch rozwiązań jest świeże. Funkcjonalność Keep Out Zones pojawiła się wraz z jedną z październikowych aktualizacji.


Dual Mode Virtual Wall to fizyczny gadżet, który tworzy niewidzialne linie, wyczuwane przez czujniki Roomby lub Braavy. Stawiamy niewidoczne dla oczu szlabany, by uchronić lub zabezpieczyć cenne przedmioty lub wejścia do konkretnych pomieszczeń. Stworzymy bariery w postaci linii prostej (do 3 metrów) lub obszaru o średnicy 1.20 m. Ten drugi przyda się, gdy w domu przebywają zwierzaki. Miski z karmą będą czuć się bezpiecznie. Zasilany bateryjnie gadżet jest kompatybilny z wybranymi Roombami już od serii 600. Kosztuje ok. 200 zł (w zestawie Roomba i7+ jest na wyposażeniu). Najnowszą alternatywą dla tej mini wieżyczki jest możliwość budowania wirtualnych stref no-go bezpośrednio na mapkach tworzonych przez roboty iRobot. Możemy dzięki temu stworzyć o wiele więcej wirtualnych stref zamkniętych dla robota odkurzającego lub pomującego. Warto jednak posiadać także Dual Mode Virtual Wall, gdyż można go używać sytuacyjnie i dużo szybciej (np. okazjonalnie).
Braava jet m6 z Easy Pad Eject
Braava jet m6 jest robotem, który wykorzystuje technologie z iRobota Roomba i7, ale jego zadaniem jest mopowanie i zamiatanie/przecieranie podłóg. iRobot dołączył do robota mopującego różne nakładki czyszczące. Daje mu to więcej możliwości. Połowa z nich jest jednorazowa, a druga do wielokrotnego użytku. Stosowanie tych pierwszych jest bardziej komfortowe, gdyż zużyty element po prostu wyrzucamy od razu do śmieci. W eksploatacji będzie to teoretycznie nieco droższe, ale oszczędzi nam mycia nakładek. Robot posiada prosty mechanizm wpinania oraz zdejmowania nakładek. Easy Pad Eject odłącza brudne nakładki jednym przyciskiem.
Nakładki dzielimy na dwa typy: do pracy na mokro i do sprzątania na sucho (elektrostatycznie). iRobot zapewnia, że nakładki do wilgotnego czyszczenia mają wystarczająco chłonne włókna, by odpowiednio zmywać także lepkie zanieczyszczenia, a nawet kuchenny tłuszcz. Bardzo ważne, by przy naprawdę dużych zabrudzeniach stosować płyn. W instrukcji wskazano, by stosować wyłącznie ten od producenta. Nakładki wielokrotnego użytku wykonane są z mikrofibry i można je prać w pralce. Jeśli chcemy mieć czyste podłogi, musimy dbać o stosowanie czystych nakładek.

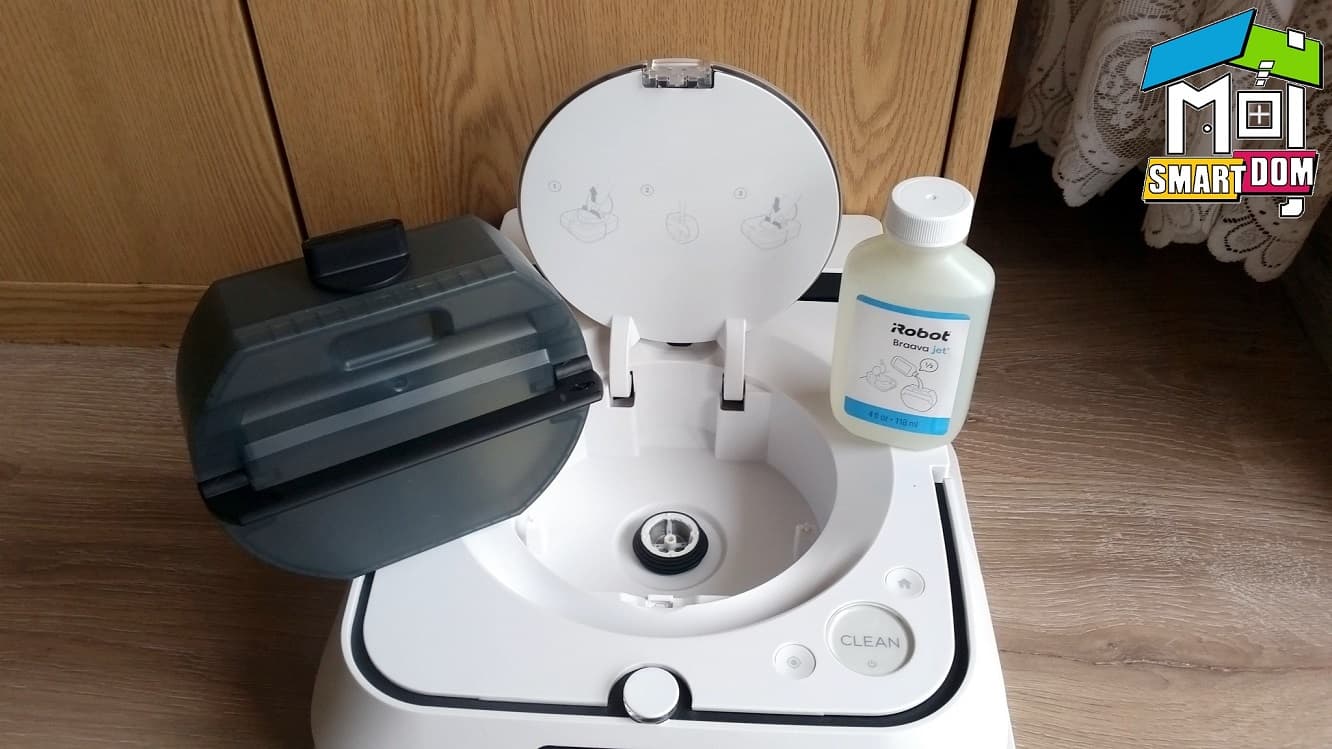
Braava jet m6 ma kierunkowy rozpylacz. Po zmapowaniu przestrzeni zaczyna pryskać przed siebie dokładną ilość wody z płynem, by przejechać nią po podłodze, a potem wytrzeć. Czynność jest powtarzana, a kwadratowy kształt i niski profil ułatwiają dotarcie do praktycznie każdego kąta. W łazienkach z zestawami podtynkowymi, gdzie sedes wisi nad podłogą, Braava będzie miała wygodniej. Urządzenie może mopować też panele i deski (dostałem zapewnienie, że nakładki mają na tyle długie włosie że wytrą wodę też z v-fug, które posidam w salonie). Główne zastosowanie robota mopującego to jednak kuchnia, łazienka i przedpokój, gdzie zwykle jest gres i twarda nawierzchnia.
Jakie są efekty pracy robota mopującego Braava? Urządzenie jest bardzo cichutkie. Spokojnie można zlecić mu mycie w nocy. Możliwa jest zmiana preferencji mopowania, a więc dostosowanie trybu pracy do zapotrzebowania. iRobot oferuje zmniejszenie spryskiwania, ale też „głębokie sprzątanie”. Pojedynczy i podwójny przejazd. Funkcja SPOT Clean to czyszczenie punktowe przestrzeni około 1,5 mkw. Zauważyłem, że inteligentne mapowanie pomieszczeń ma znaczenie dla końcowego efektu mycia. Początkowo smug i śladów od kółek było więcej. Gdy robot nauczył się pomieszczeń, obierał optymalną drogę i zmywał mądrzej. W instrukcji zaznaczono, by okresowo dbać też o czystość kółeczek – co zrozumiałe. Podczas pracy „na sucho” całe sprzątanie jest szybsze. Ze spryskiwaniem przejazd jest dłuższy, bo urządzenie ma więcej pracy.
Synergia Imprint Link w praktyce
W pierwszym artykule tylko napomknąłem o technologii Imprint Link. Po kilku tygodniach działania Roomby i Braavy w moim wnętrzu, mogę napisać o tym rozwiązaniu coś więcej. iRobot mając w „stajni” różne urządzenia od dbania o podłogi, wykorzystało ich wspólny potencjał – współpracę i koordynację. Roboty można zaprogramować do działania jedno po drugim przez harmonogramy, ale taki rodzaj automatyki może być zawodny. Wyobraźmy sobie, że odkurzacz nie dokończył jeszcze swojej pracy, np. z powodu kończącej się energii i jego praca się przedłuży (musi się doładować), a według harmonogramu niebawem ma wyruszyć do pracy Braava jet m6. Może to doprowadzić do konfliktu. Przykładowo Braava jet m6 zacznie myć po nieodkurzonej powierzchni. Testując roboty oddzielnie, zbudowałem im plan w odległych czasowo przedziałach. Właśnie po to, by nie dochodziło do kolizji zadań. Imprint Link wyszło naprzeciw posiadaczom obu nowoczesnych robotów, łącząc ich działania w skoordynowany plan.
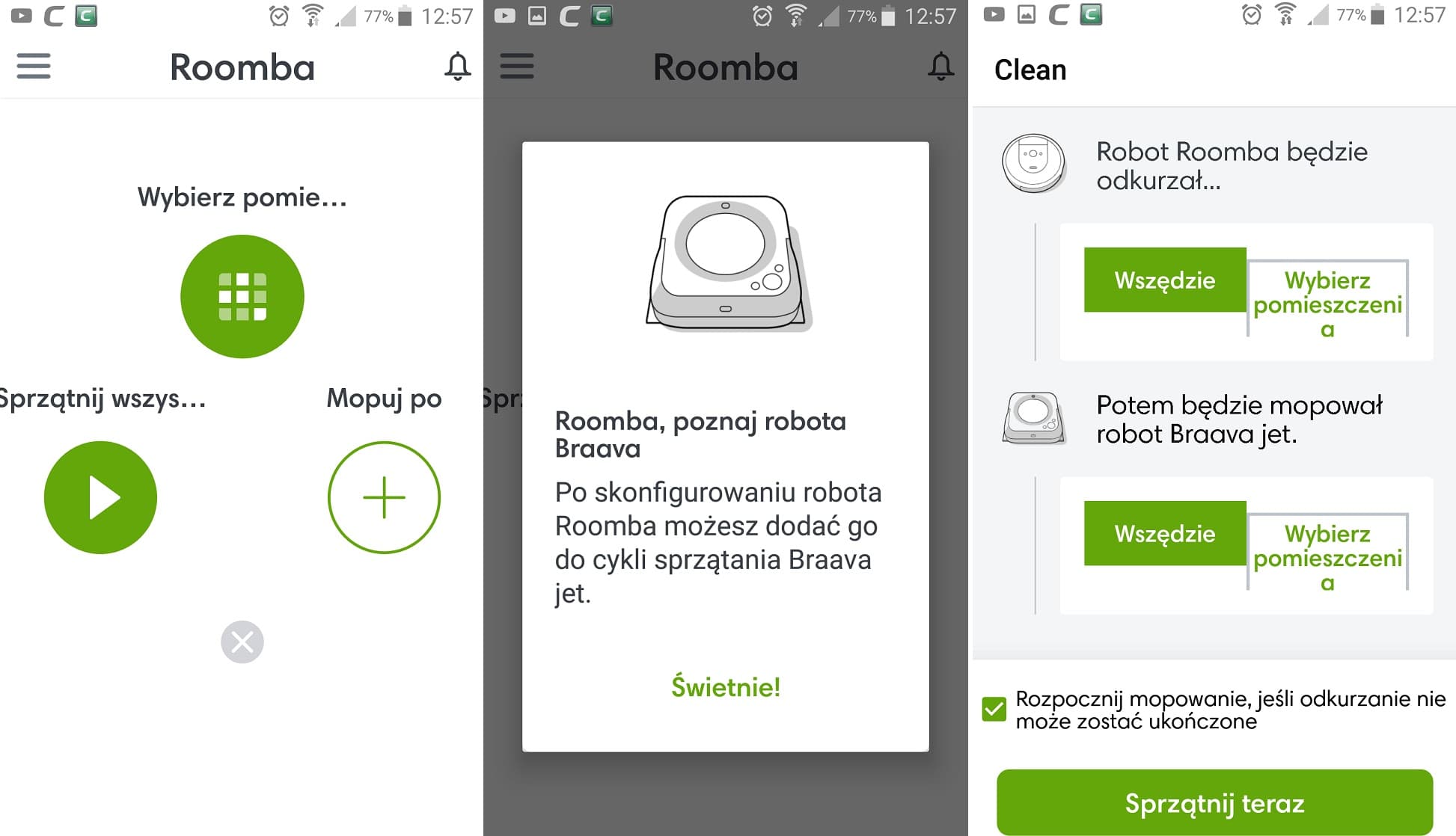
Imprint Link jest rodzajem Internetu Rzeczy w sferze czystości. Automatyzacja w duecie usunie potrzebę angażowania użytkownika, a przecież o to właśnie w robotyce chodzi. System działania w tej technologii jest logiczny: najpierw odkurza Roomba i7 (współpraca obejmuje też s9+ oraz serią 900), by potem w teren wyjechał robot mopujący Braava jet m6. Ten drugi czeka na swój sygnał. Łączony cykl można też uruchomić zdalnie przez smartfon z aplikacją iRobot HOME. O niej już za momencik.
Porozumiewanie się robotów Roomba i Braava jest naturalnym rozwinięciem ich poszczególnych umiejętności. Według mnie dochodzi tu do efektu synergii. Razem ostateczny efekt jest lepszy. Odkurzenie i umycie są szybsze. Braava jet m6 jest inteligentniejszym mopem od poprzednika (jet m240 był przeznaczony raczej do mniejszych przestrzeni), więc warto było wykorzystać jego możliwości w takiej współpracy. Dzięki iAdapt 3.0 i vSLAM Braava jest w stanie wymyć podłogi precyzyjniej, więc aż prosiło się o dodanie automatyki IoT.
Jak już wyżej pisałem, sprawdziłem działanie obu robotów w niezależnej pracy, by potem ocenić ich wspólne możliwości przez Imprint Link. W tandemie iRoboty sprawdzą się zwłaszcza wtedy, gdy chcemy zaoszczędzić czas. Roomba i Braava wykonają wspólnie zadanie automatycznie. Będzie tu jeszcze mniej działań z naszej strony. Możemy nawet połączyć pracę w parze dla konkretnych pomieszczeń. Uczulę od razu, by pamiętać o przygotowaniu Braavy do działania (napełnić zbiorniczek wodą i płynem oraz zamontować nakładkę mopującą). Bez tego robot nie wyjedzie w trasę.
Oba urządzenia podczas swoich wyjazdów mapują przestrzeń cały czas, np. przesunięte meble, co w przyszłości mogłoby zwiększyć ich skuteczność przy wymianie uwag między sobą. Przykładowo, gdy Roomba wcześniej przejechała już po mieszkaniu, mogłaby wysłać najaktualniejszą mapę Braavie. Ta dysponowałaby nowymi danymi i jeszcze szybciej wykonała swoją rolę. Oczywiście zakładając, że dzieje się to w pustym domu (bez kolejnych zmian w ułożeniu obiektów). Taka aktualizacja Imprint Link wniosłaby kooperację na jeszcze wyższy poziom.
Aplikacja iRobot Home
Czas przyjrzeć się aplikacji mobilnej do robotów marki iRobot. Teoretycznie odkurzanie i mopowanie jest możliwe bez użycia smartfona (na obu maszynach są przyciski akcji), ale program jest komplementarną częścią całego zestawu i warto poznać jego wszystkie możliwości. Telefon jest centrum sterowania i zarządzania robotami. Wizualizuje też mapę mieszkania i pozwala doprecyzować wytyczne w pracy. iRobot Home jest oczywiście dostępne na obie najpopularniejsze platformy – iOS oraz Androida.
Przede wszystkim, aplikacja to ważny element konfiguracji sprzętu. Opisywałem już ten proces w poprzednim artykule, więc nie będę się niepotrzebnie powtarzał. Program pozwala przeglądać historię sprzątań dodanych robotów i organizować im czas pracy. Właśnie tu zbudujemy harmonogramy, utworzymy działania w ramach Imprint Link, czy dopracujemy obszary poszczególnych pomieszczeń. Moje iRoboty rozpoznały jedno z pomieszzczeń. Dzięki aplikacji resztę mogłem szybciutko wskazać. Łączy się to z prostym ustaleniem granic (najczęściej na wejściach). Pozostaje nazwać pomieszczenia. Będziemy wtedy mogli wysyłać urządzenia do ich niezależnego sprzątania. Nie zawsze potrzebujemy odkurzać naraz całe wnętrze.

Mapka dodatkowo przedstawia obszary, w których roboty zatrzymały się na dłużej (były dla nich w tych miejscach bardziej wymagające). Dwa szybkie przykłady: kuchnia z aneksem i przedpokój (przedłużenie pokoju dziennego). W tych rejonach pomocne są czujniki Dirt Direct. Roboty potrafią rozpoznać, które miejsca w mieszkaniu się bardziej brudzą i wymagają odpowiednich działań. Domownicy sprawdzą też trochę statystyk: czas oraz powierzchnię sprzątania. Mamy zatem opcję raportowania pracy. Dobrze czasem sprawdzić, co i jak wykonały nasze smart urządzenia. Właściwie to naszym jedynym zadaniem pozostaje kontrolowanie efektów. Czy dodałem, że aplikacja to też zdalny pilot, czyli okazja do uruchamiania robotów z dowolnego miejsca z dostępem do Internetu? Jeśli mamy ustawione harmonogramy regularnej pracy to zdalny dostęp przydaje się okazjonalnie. Mi się jednak zdalny dostęp przydawał. Psy rozchlapywały uszami wodę z misek (Spaniele) i brudnymi łapami rozniosły w kuchni brud. Widać to było przez mój monitoring. Braava otrzymała wtedy ode mnie konkretne zadanie. Na szczęście miała już przygotowaną nakładkę i pełny zbiornik. O tym trzeba już po prostu pamiętać.
W następnym odcinku (zamykającym) planuję napisać o:
- rozpoznawaniu wielu pięter (mieszkań?)
- więcej o iRobot w domu ze zwierzakami
- wysokowydajnym filtrze AeroForce
- pojemniku na brud (pokazać – jeśli Roomba jest bez Clean Base)
- systemie czujników: antykolizyjny, krawędzi, wykrywaniu brudu, odległości, odometr, optyczny kierunku ruchu, optyczny vSLAM (kamera), przeciw zaplątaniu się w kable, przeszkód, uskoku podłoża, wykrywający zabrudzone miejsca
- Braava jet m6 – eksploatacja (płyn)
- wrażenia po miesiącu pracy robotów
Materiał przygotowany z merytorycznym wsparciem marki iRobot




8 Comments
Dodaj komentarz

n")



:")

")
")



")
")



")
")
")







")
")

{kind=link}
braava jest naprawdę super urządzeniem 🙂 uwielbiam je. Mam tez roombę, zeby mi odkurzała 🙂 i tak mozna życ 🙂
Rewelacyjna jest braava, ja trochę od tyłu zrobiłam, najpierw kupiłam braavę, teraz planuję roombę 😀
czy taka roomba sprawdzi się do domu 80m??? chciałabym mieć trochę odpoczynku od sprzątania…
No jasne, ale pewnie nie w jednym cyklu. Będzie się pewnie musiała doładować (zależnie oczywiście od zabrudzeń).
Mam roombe i7 i sprząta 110 m2 na jednym doładowaniu i jeszcze baterii zostaje 🙂
Teraz bardzo podoba mi sie j7! elegancji wygląd i fajne zbieranie na dywanach
Spełnia nasze oczekiwania, sprzęt godny polecenia
Chciałabym zapytać jak braava radzi sobie z progami albo listwami pomiędzy płytkami a panelami? Mam już i7 a teraz myślę o robocie mopujacym.